İsviçre’deki École polytechnique fédérale de Lausanne (EPFL) araştırmacıları, robotik el teknolojisinde önemli bir yenilik sundu. Geliştirilen yeni nesil robotik el, robot kolundan ayrılarak kendi başına hareket edebilme yeteneğiyle robotların işlevselliğini artırıyor. Bu teknoloji, robotların daha geniş alanlara erişmesini ve daha karmaşık görevleri yerine getirmesini sağlayabilir. Araştırma, Uluslararası Robotik ve Otomasyon Konferansı’nda (ICRA) sunuldu ve IEEE Spectrum dergisi tarafından gündeme taşındı.
Robot kolların genellikle sabit bir yapıya sahip olmasından dolayı hareket alanları sınırlıdır. Bu kısıtlama, robotların güç ve hızlarını artırmak amacıyla genellikle zemin ya da diğer yapısal desteklere sabitlenmeleri nedeniyle ortaya çıkar. EPFL’nin Öğrenme Algoritmaları ve Sistemler Laboratuvarı (LASA) tarafından yürütülen bu çalışma, robotik kolun sabit yapısını aşarak, zaman zaman bağımsız hareket edebilen ve çok yönlü kavrama yeteneği sunan bir robotik el geliştirmeyi amaçladı.
Genetik algoritma ve fizik simülatörleri ile tasarım
Araştırma ekibi, robotik elin hem nesneleri kavrama hem de bağımsız olarak hareket etme işlevlerini yerine getirebilmesi için temel bir tasarımı genetik algoritma yardımıyla oluşturdu. Genetik algoritmalar, doğal seçilim ve evrim gibi biyolojik prensipleri kullanarak en uygun tasarımları belirlemekte oldukça etkilidir. Bu süreçte, MuJoCo adlı bir fizik simülatörü kullanılarak tasarımın pratikliği test edildi.
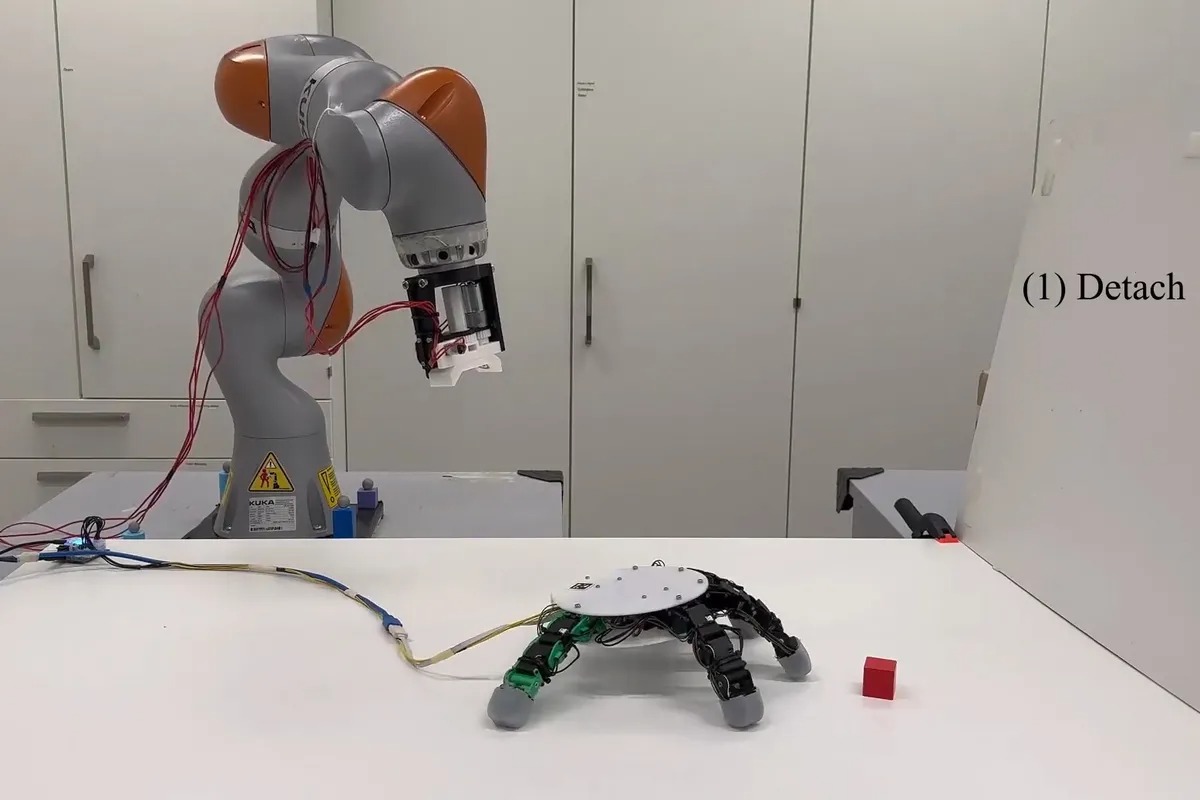
Yapılan testler sonucunda, insan eline benzer şekilde beş parmağın en uygun çözüm olduğu belirlendi. Ayrıca robotik elin bilek kısmında yer alan manyetik bir bağlantı sistemi, elin robot koluna otomatik olarak bağlanıp ayrılmasına olanak tanıyor. Bu sayede el, sadece robot koluna bağlıyken değil, aynı zamanda bağımsız bir şekilde de görev yapabiliyor.
Robotik elin parmakları iki yöne doğru bükülebilecek şekilde tasarlandı. Bu, elin bir kısmını nesneleri kaldırmak için kullanırken, diğer parmakların ise bağımsız bir şekilde hareket etmesine olanak tanıyor. El, robot koluna bağlıyken birden fazla nesneyi aynı anda kaldırabilme yeteneğine sahip. Bu özellik, robot kolunun pozisyonunu değiştirmeden görevlerini daha verimli bir şekilde gerçekleştirmesine katkı sağlıyor.
Geliştirilen bu el, sadece hareket kabiliyeti açısından değil, aynı zamanda çok işlevlilik açısından da dikkat çekiyor. Boston Dynamics’in dört ayaklı robotu Spot gibi daha büyük ve hantal robotların aksine, bu küçük ve çevik robotik el, dar alanlarda keşif yapma veya analiz gerçekleştirme konusunda daha büyük bir avantaj sunabilir. Spot gibi robotlar zaten bir robot kolu ve kavrayıcı ile donatılmış olsa da, bağımsız hareket edebilen bir el, bu tür sistemlerin erişimini ve işlevselliğini önemli ölçüde genişletebilir.
EPFL araştırmacıları, bu tür yeniliklerin endüstriyel otomasyon, keşif ve hassas üretim süreçlerinde geniş uygulama alanları bulabileceğini belirtiyor. Robotların bağımsız çalışma kabiliyetinin artması, bu sistemlerin daha otonom hale gelmesini ve insan müdahalesine ihtiyaç duymadan karmaşık görevleri yerine getirebilmesini mümkün kılabilir. Bu da gelecekte robotik sistemlerin daha yaygın bir şekilde kullanılmasına kapı aralayabilir.

